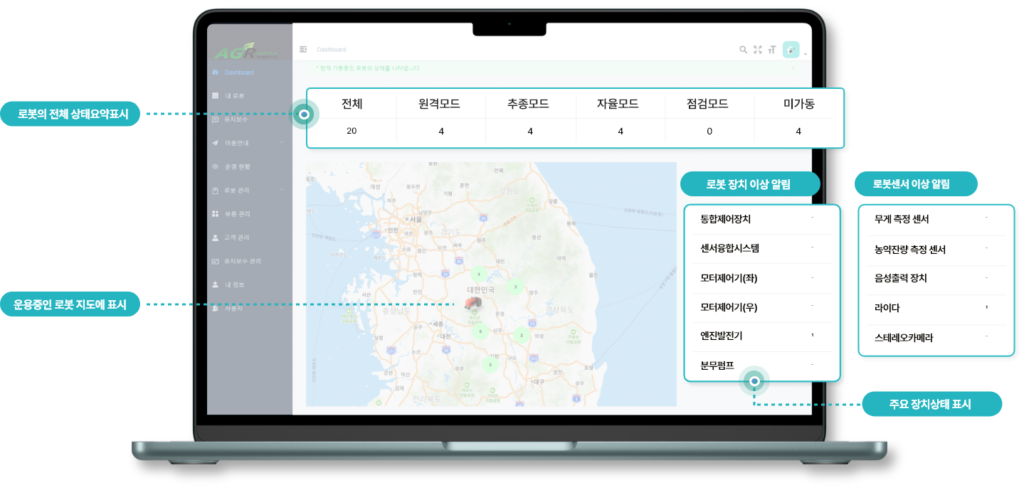
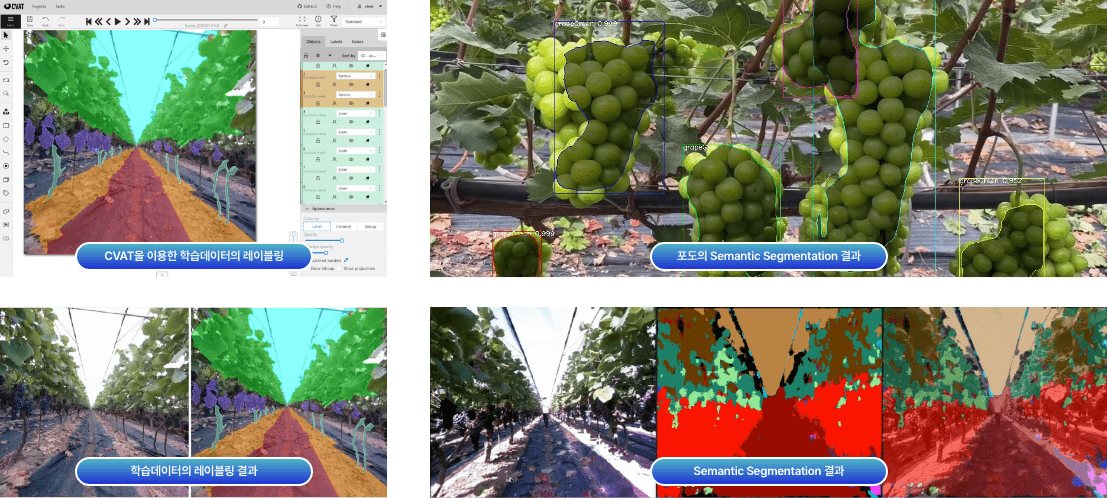
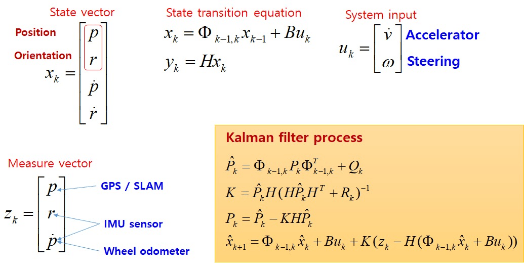
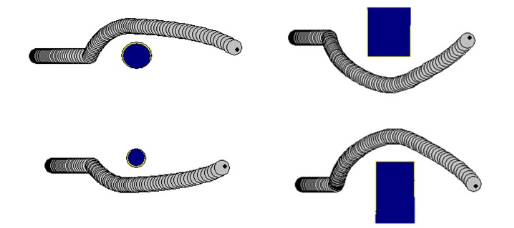
기술 소개 AI 기반 실외 자율주행 시스템 기술 ICT 기반 통합 모니터링 시스템 기술 AI 및 ICT 기술 융합 로봇 시스템 운용 기술 ICT 기반 통합 모니터링 시스템 기술 통합 모니터링 시스템 실외 및 시설재배 운용 로봇 상태 정보 모니터링 직물 상태 및 수확 정보 관리 사용자 친화형 UI AI 딥러닝 기반 시맨틱 세그멘테이션(Semantic Segmentation) 기술을 이용한 환경 인식 기술 농업로봇 실증농장 (포도 농장) 학습 데이터 수집 CVAT를 이용한 레이블링 수행 FCN에서 학습 데이터 추출 후 학습 수행 진행 주행영상을 픽셀 단위로 구분 주행가능 영역과 부가 영역을 추출하여 주행 명령 생성 선행 연구로 포도에 대한 인식을 적용함 농업로봇 주행경로 생성 기술 농업로봇 실증농장 (포도 농장) 환경 영상 데이터 수집 CVAT를 이용하여 사람, 동물, 차량들 장애물에 대한 레이블링 수행 추종 모드에서의 사람과의 거리유지를 위한 실시간 연산 수행 농작업자 및 동적 장애물에 대한 인식 결과 GPS, IMU, Wheel encoder 정보 융합을 위한 칼만필터를 설계 라이다 및 3D 카메라 데이터와의 융합을 위한 변환 및 필터링을 수행 로봇 팔의 수확물 이동경로 생성 재배작물 주변 환경 인식 (잎, 가는 줄기, 굵은 줄기) 주행 알고리즘에 적용된 장애물 회피 기술 적용 -> 작물까지 도달 가능한 로봇팔의 이동경로 생성 로봇 팔 이동경로 생성을 위한 시뮬레이션 DWA(Dynamic Window Approach) 알고리즘에 사각형 형태의 플랫폼에 대한 충돌 검출 제자리 회전 및 후진 기능을 추가하여 실시간 경로 계획 구현